В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение (прошивка) для него.
Общее описание.
Контроллер шагового двигателя разработан на PIC контроллере PIC12F629. Это 8 выводной микроконтроллер стоимостью всего 0,5 $. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
- Контроллер имеет варианты схем для управления как униполярным, так и биполярным шаговым двигателем.
- Обеспечивает регулировку скорости вращения двигателя в широких пределах.
- Имеет два режима управления шаговым двигателем:
- полношаговый;
- полушаговый.
- Обеспечивает вращение в прямом и реверсивном направлениях.
- Задание режимов, параметров, управление контроллером осуществляется двумя кнопками и сигналом ВКЛ (включение).
- При выключении питания все режимы и параметры сохраняются в энергонезависимой памяти контроллера и не требуют переустановки при включении.
Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток – случай крайне редкий. Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует.
Про режимы и способы управления шаговым двигателем можно почитать , про дайверы .
Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.

Объяснять в схеме особенно нечего. К PIC контроллеру подключены:
- кнопки "+" и "–" (через аналоговый вход компаратора);
- сигнал ВКЛ (включение двигателя);
- драйвер (транзисторы VT1-Vt4 , защитные диоды VD2-VD9).
PIC использует внутренний генератор тактирования. Режимы и параметры хранятся во внутреннем EEPROM.
Схема драйвера на биполярных транзисторах КТ972 обеспечивает ток коммутации до 2 А, напряжение обмоток до 24 В.
Я спаял контроллер на макетной плате размерами 45 x 20 мм.

Если ток коммутации не превышает 0,5 А, можно использовать транзисторы серии BC817 в корпусах SOT-23. Устройство получится совсем миниатюрным.
Программное обеспечение и управление контроллером.
Резидентное программное обеспечение написано на ассемблере с циклической переустановкой всех регистров. Программа зависнуть в принципе не может. Загрузить программное обеспечение (прошивку) для PIC12F629 можно .
Управление контроллером достаточно простое.
- При активном сигнале "ВКЛ" (замкнут на землю) двигатель крутится, при неактивном (оторван от земли) – остановлен.
- При работающем двигателе (сигнал ВКЛ активен) кнопки "+" и "–" меняют скорость вращения.
- Каждое нажатие на кнопку "+" увеличивает скорость на минимальную дискретность.
- Нажатие кнопки "–" - уменьшает скорость.
- При удержании кнопок "+" или "–" скорость вращения плавно увеличивается или уменьшается, на 15 значений дискретности в сек.
- При остановленном двигателе (сигнал ВКЛ не активен).
- Нажатие кнопки "+" задает режим вращения в прямом направлении.
- Нажатие кнопки "–" переводит контроллер в режим реверсивного вращения.
- Для выбора режима – полношаговый или полушаговый необходимо при подаче питания на контроллер удерживать кнопку "–" в нажатом состоянии. Режим управления двигателем будет изменен на другой (проинвертирован). Достаточно выдержать кнопку – нажатой в течение 0,5 сек.
Схема контроллера униполярного шагового двигателя с драйвером на MOSFET транзисторах.

Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
- Сопротивление транзисторов в открытом состоянии не более 0,05 Ом. Значит малое падение напряжения (0,1 В при токе 2 А), транзисторы не греются, не требуют радиаторов охлаждения.
- Ток транзисторов до 4 А.
- Напряжение до 55 В.
- В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. Т.е. на реализацию драйвера потребуется 2 миниатюрных корпуса.
Таких параметров невозможно достичь на биполярных транзисторах. При токе коммутации свыше 1 А настоятельно рекомендую вариант утройства на MOSFET транзисторах.
Подключение к контроллеру униполярных шаговых двигателей.
В униполярном режиме могут работать двигатели с конфигурациями обмоток 5, 6 и 8 проводов.
Схема подключения униполярного шагового двигателя с 5 и 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 6 проводов выводы промаркированы следующим цветами.

Конфигурация с 5 проводами это вариант, в котором общие провода обмоток соединены внутри двигателя. Такие двигатели бывают. Например, PM35S-048.

Документацию по шаговому двигателю PM35S-048 в PDF формате можно загрузить .
Схема подключения униполярного шагового двигателя с 8 проводами (выводами).

То же самое как и для предыдущего варианта, только все соединения обмоток происходят вне двигателя.
Как выбирать напряжение для шагового двигателя.
По закону Ома через сопротивление обмотки и допустимый ток фазы.
U = Iфазы * Rобмотки
Сопротивление обмотки постоянному току можно измерить, а ток надо искать в справочных данных.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Как определить обмотки шаговых двигателей, если нет справочных данных.
В униполярных двигателях с 5 и 6 выводами, средний вывод можно определить, измерив, сопротивление обмоток. Между фазами сопротивление будет в два раза больше, чем между средним выводом и фазой. Средние выводы подключаются к плюсу источника питания.
Дальше любой из фазных выводов можно назначить фазой A. Останется 8 вариантов коммутаций выводов. Можно их перебрать. Если учесть, что обмотка фазы B имеет другой средний провод, то вариантов становится еще меньше. Попутка обмоток фаз не ведет к выходу из строя драйвера или двигателя. Двигатель дребезжит и не крутится.
Только надо помнить, что к такому же эффекту приводит слишком высокая скорость вращения (выход из синхронизации). Т.е. надо скорость вращения установить заведомо низкую.
Схема контроллера биполярного шагового двигателя с интегральным драйвером L298N.
Биполярный режим дает два преимущества:
- может быть использован двигатель с почти любой конфигурацией обмоток;
- примерно на 40% повышается крутящий момент.
Создавать схему биполярного драйвера на дискретных элементах – дело неблагодарное. Проще использовать интегральный драйвер L298N. Описание на русском языке есть .
Схема контроллера с биполярным драйвером L298N выглядит так.
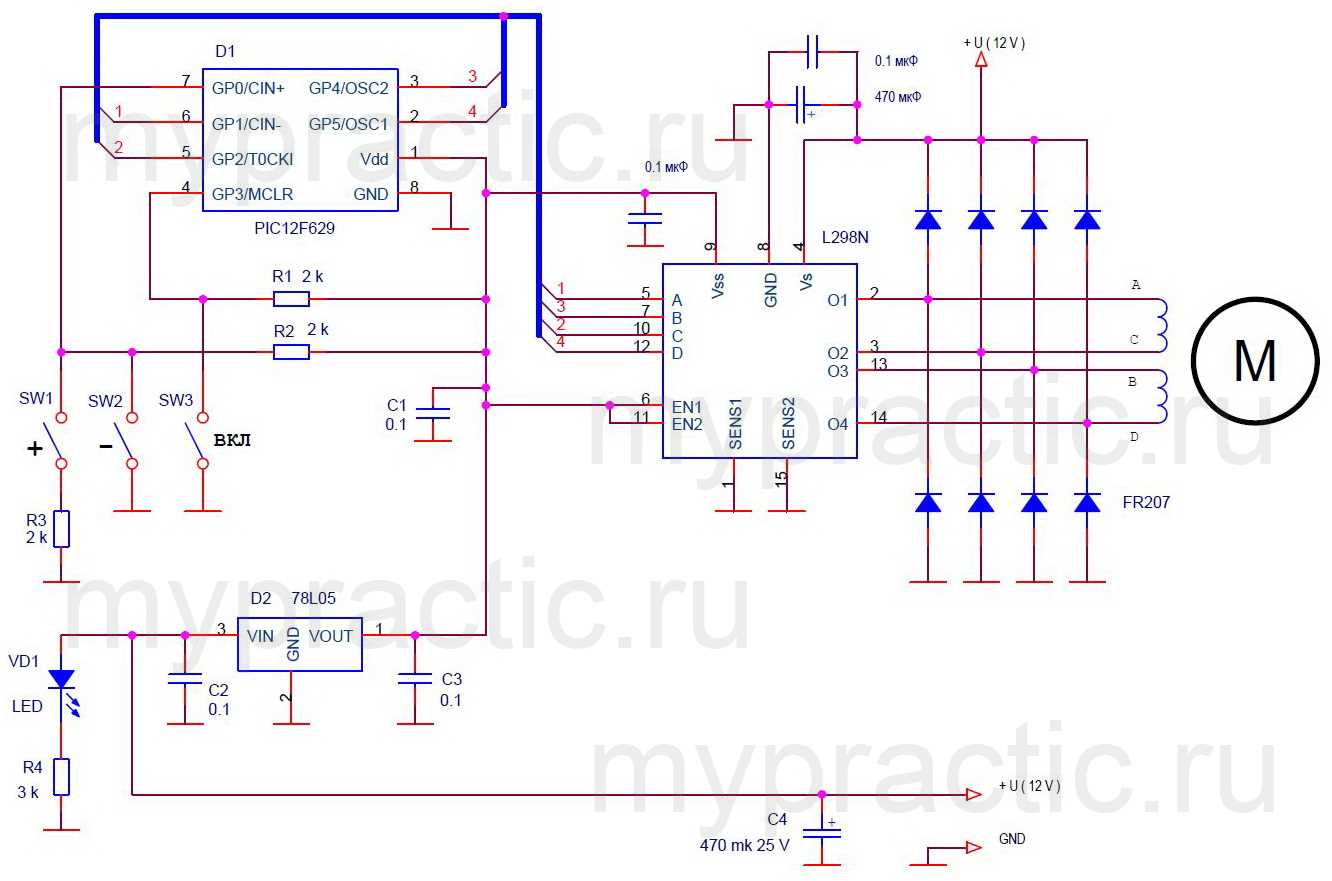
Драйвер L298N включен по стандартной схеме. Такой вариант контроллера обеспечивает фазные токи до 2 А, напряжение до 30 В.
Подключение к контроллеру биполярных шаговых двигателей.
В этом режиме может быть подключен двигатель с любой конфигурацией обмоток 4, 6, 8 проводов.
Схема подключения биполярного шагового двигателя с 4 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 4 провода выводы промаркированы следующим цветами.
Схема подключения биполярного шагового двигателя с 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с такой конфигурацией обмоток выводы промаркированы следующим цветами.
Такая схема требует напряжения питания в два раза большего по сравнению с униполярным включением, т.к. сопротивление обмоток в два раза больше. Скорее всего, контроллер надо подключать к питанию 24 В.
Схема подключения биполярного шагового двигателя с 8 проводами (выводами).
Может быть два варианта:
- с последовательным включением
- с параллельным включением.
Схема последовательного включения обмоток.

Схема с последовательным включением обмоток требует в два раза большего напряжения обмоток. Зато не увеличивается ток фазы.
Схема параллельного включения обмоток.

Схема с параллельным включением обмоток увеличивает в 2 раза фазные токи. К достоинствам этой схемы можно отнести, низкую индуктивность фазных обмоток. Это важно на больших скоростях вращения.
Т.е. выбор между последовательным и параллельным включением биполярного шагового двигателя с 8 выводами определяется критериями:
- максимальный ток драйвера;
- максимальное напряжение драйвера;
- скорость вращения двигателя.
Программное обеспечение (прошивка) для PIC12F629 можно загрузить .
Простой контроллер Шагового Двигателя из компьютерного барахла стоимостью ~150 рублей.
Началось мое станкостроение со случайной ссылки на немецкий станок за 2000DM, который на мой взгляд выглядел по детски, однако мог выполнять довольно много занятных функций. В тот момент, меня заинтересовала возможность рисовать платы (это было еще до появления в моей жизни ЛУТ).
В результате протяженных поисков в сети было найдено несколько сайтов посвященных этой проблеме, однако русскоязычных среди них не было ни одного (это было примерно 3 года назад). В общем, в конце концов, я нашел два принтера CM6337 (кстати их выпускал Орловский завод УВМ), откуда и выдрал униполярные шаговые двигатели (Dynasyn 4SHG-023F 39S, аналог ДШИ200-1-1). Параллельно с доставанием принтеров заказал и микросхемы ULN2803A(с буквой А – DIP корпус). Все собрал, запустил. Что получил, а получил дико греющиеся микросхемы ключей, и с трудом вращающийся двигатель. Так как по схеме из Голландии для увеличения тока ключи соединены попарно, то максимальный отдаваемый ток не превышал 1А, в то время как двигателю надо было 2А (кто ж знал что я найду такие прожорливые, как мне тогда показалось, двигатели J). Кроме того, данные ключи построены по биполярной технологии, для тех кто не в курсе, падение напряжения может быть до 2В (если питание от 5, то фактически половина падает на сопротивлении перехода).
В принципе, для опытов с двигателями от 5” дисководов очень неплохой вариант, можно сделать например плоттер, однако что то более тяжелое чем карандаш (например дремель) ими вряд ли можно тягать.
Решил собрать свою собственную схему из дискретных элементов, благо в одном из принтеров оказалась нетронутой электроника, и я взял оттуда транзисторы КТ829 (Ток до 8А, напряжение до 100В)… Была собрана такая схема…
Рис.1 – Схема драйвера для 4х фазного униполярного двигателя.
Сейчас объясню принцип. При подаче логической “1” на один из выводов (на остальных “0”), например на D0, транзистор открывается и ток течет через одну из катушек двигателя, при этом двигатель отрабатывает один шаг. Далее единица подается на следующий вывод D1, а на D0 единица сбрасывается в ноль. Двигатель отрабатывает сладующий шаг. Если подавать ток сразу в две соседние катушки то реализуется режим полушагов (для моих двигателей с углом поворота 1,8’ получается 400 шагов на оборот).
К общему выводу подсоединяются отводы от середины катушек двигателя (их два если проводов шесть). Очень хорошо теория шаговых двигателей описана тут — Шаговые двигатели. Управление шаговым двигателем., тут же приведена схема контроллера ШД на микроконтроллере AVR фирмы Atmel. Честно говоря, мне показалось похоже на забивание гвоздей часами, однако в ней реализована очень хорошая функция как ШИМ регулирование тока обмоток.
Поняв принцип, несложно написать программу управляющую двигателем через LPT порт. Зачем в этой схеме диоды, а за тем, что нагрузка у нас индуктивная, при возникновении ЭДС самоиндукции она разряжается через диод, при этом исключается пробой транзистора, а следовательно и вывод его из строя. Еще одна деталь схемы – регистр RG (я использовал 555ИР33), используется как шинный формирователь, поскольку ток отдаваемый, например LPT портом мал – можно его элементарно спалить, а следовательно, есть возможность спалить весь компьютер.
Схема примитивна, и собрать такое можно минут за 15-20, если есть все детали. Однако у такого принципа управления есть недостаток – так как формирование задержек при задании скорости вращения задается программой относительно внутренних часов компьютера то работать в многозадачной системе (Win) это все не будет! Будут просто теряться шаги (может быть в Windows и есть таймер, но я не в курсе). Второй недостаток – это нестабилизированный ток обмоток, максимальную мощность из двигателя не выжать. Однако по простоте и надежности этот способ меня устраивает, тем более что для того, что бы не рисковать своим Атлоном 2ГГц, я собрал из барахла 486 тарантас, и кроме ДОСа там, в принципе мало, что можно поставить нормальное.
Описанная выше схема работала и в принципе неплоха, но я решил, что можно несколько переделать схему. Применить MOSFETJ). транзисторы (полевые), выигрыш в том, что можно коммутировать огромные токи (до 75 – 100А), при солидных для шаговых двигателей напряжениях (до 30В), и при этом детали схемы практически не греются, ну если не считать предельных значений (хотел бы я видеть тот который съест ток 100А
Как всегда в России возник вопрос, где взять детали. У меня возникла идея – извлечь транзисторы из горелых материнских плат, благо, например Атлоны кушают порядочно и транзисторы там стоят огого. Дал объявление в ФИДО, и получил предложение забрать 3 мат. платы за 100 рублей. Прикинув что в магазине за эти деньги можно от силы купить 3 транзистора, забрал, расковырял и о чудо, хотя они все и были дохлыми, ни один транзистор в цепи питания процессора не пострадал. Так я получил пару десятков полевых транзисторов за сто рублей. Схема, которая получилась в результате, представлена ниже.

Рис. 2 – Тоже на полевых транзисторах
Отличий в этой схеме немного, в частности была применена микросхема нормального буфера 75LS245 (выпаяна над газовой плитой из 286 материнской платы J). Диоды можно поставить любые, главное, что бы их максимальное напряжение не было меньше максимального напряжения питания, а предельный ток не меньше тока питания одной фазы. Я поставил диоды КД213A, это 10А и 200В. Возможно это излишне для моих 2х амперных двигателей, однако покупать детали не было смысла, да и запас по току думается лишним не будет. Резисторы служат для ограничения тока перезарядки емкости затворов.
Ниже приводится печатная плата контроллера построенного по такой схеме.

Рис. 3 – Печатная плата.
Печатная плата разведена для поверхностного монтажа на одностороннем текстолите (лень мне что то дырочки сверлить сталоJ). Микросхемы в DIP корпусах паяются с подогнутыми ножками, резисторы SMD с тех же материнок. Файл с разводкой в Sprint-Layout 4.0 прилагается. Можно было бы запаять на плату и разъемы, но лень как говорится — двигатель прогресса, да и при отладке железа удобнее было запаять провода подлиннее.
Еще необходимо отметить, что схема снабжена тремя концевиками, на плате справа снизу шесть контактов вертикально, радом с ними посадочные места под три резистора, каждый соединяет один вывод выключателей с +5В. Схема концевиков:

Рис. 4 – Схема концевиков.
Вот так это выглядело у меня в процессе наладки системы:
В результате на представленный контроллер я потратил не более 150 рублей: 100 рублей за материнские платы (при желании можно вообще бесплатно достать) + кусок текстолита, припой и банка хлорного железа в сумме тянут на ~50 рублей, причем хлорного железа останется потом еще много. Думаю считать провода и разъемы смысла не имеет. (Кстати разъем питания отпилен от старого винчестера.)
Так как практически все детали сделаны в домашних условиях, с помощью дрели, напильника, ножовки, рук и такой то матери, то зазоры конечно гигантские, однако модифицировать отдельные узлы в процессе эксплуатации и опытов проще, чем изначально делать все точно.
Если бы на Орловских заводах проточить отдельные детали не стоило бы так дорого, то мне бы конечно проще было бы вычертить все детали в CAD’е, со всеми квалитетами и шероховатостями и отдать на съедение рабочим. Однако знакомых токарей нет… Да и руками как то знаете ли интереснее…
P.S. Хочу высказать свое мнение по поводу негативного отношения автора сайта к советским и Российским двигателям. Советские двигатели ДШИ, вполне себе даже ничего, даже маломощный ДШИ200-1-1. Так что если вам удалось откопать за “пиво” такое добро не спешите выкидывать их, они еще поработают… проверено… Но если же покупать, и разность в стоимости не велика, лучше все таки брать иностранные, поскольку точность у них конечно будет выше.
P.P.S. Е: Если что то я написал не правильно пишите, исправим, но … РАБОТАЕТ…
— хотя биполярные шаговые двигатели относительно дороги, для своих физических размеров они обеспечивают высокий вращающий момент. Однако для двух обмоток мотора требуется восемь управляющих транзисторов, соединенных в четыре Н-моста. Каждый транзистор должен выдерживать перегрузки и короткие замыкания и быстро восстанавливать работоспособность. А драйверу, соответственно, требуются сложные схемы защиты с большим количеством пассивных компонентов.

Рисунок 1
Рисунок 1. Одна микросхема в корпусе для поверхностного монтажа и несколько пассивных компонентов могут управлять биполярным шаговым двигателем.
Управление биполярным шаговым двигателем
Драйвер шагового двигателя своими руками — на Рисунке 1 показана альтернативная схема драйвера двигателя, основанная на аудио усилителе класса D компании Maxim. Микросхема МАХ9715 в миниатюрном корпусе для поверхностного монтажа может отдавать мощность до 2.8 Вт в типичную нагрузку 4 или 8 Ом. Каждый из двух выходов микросхемы образован Н-мостами из мощных MOSFET, управляющими парами линий OUTR+, OUTR- и OUTL+, OUTL-, которые подключаются к обмоткам А и В шагового двигателя, соответственно. Каждая пара формирует дифференциальный широтно-модулированный импульсный сигнал с номинальной частотой переключения 1.22 МГц. Малый уровень помех, создаваемых схемой, исключает необходимость в выходных фильтрах.
Конденсаторы развязки
Конденсаторы С1, С3, С4 и С6 служат развязкой для входов питания и смещения, а С5 и С7 выполняют накопительные функции для мощных выходных усилителей класса D. Конденсаторы С8 и С9 ограничивают полосу пропускания усилителя до 16 Гц, а ферритовые бусины L2 и L3 ослабляют электрические помехи, наводимые на длинные кабели. П-образный фильтр C1, C2, L1 подавляет помехи на входе питания микросхемы IС1. Входные сигналы микросхемы Шаг_А и Шаг_В, управляющие, соответственно, правым и левым каналами двигателя, могут формироваться любым подходящим контроллером. Внутренние цепи защищают усилитель от коротких замыканий и перегрева в случае неисправности шагового двигателя или неправильного подключения его выводов.

Таблица 1
Иллюстрация последовательности импульсов
Таблица 1 иллюстрирует последовательность импульсов Шаг_А и Шаг_В, управляющих вращением типичного шагового двигателя в одном направлении путем непрерывной подачи комбинаций сигналов от 0 до 4. Шаг 4 возвращает вал двигателя в исходное положение, завершая оборот в 360°. Чтобы изменить направление вращения мотора, начинайте формировать временную диаграмму импульсов снизу таблицы и последовательно двигайтесь по ней вверх. Подав напряжение низкого логического уровня на вход SHDN микросхемы (вывод 8), можно отключить оба канала усилителя. Формы сигналов на входах и выходах схемы представлены на Рисунке 2.
Шаг 1.
Нам потребуется…
От старого сканера:
- 1 шаговый двигатель
- 1 микросхема ULN2003
- 2 стальных прута
Для корпуса: - 1 картонная коробка
Инструменты:
- Клеевой пистолет
- Кусачки
- Ножницы
- Принадлежности для пайки
- Краска
Для контроллера:
- 1 разъем DB-25 - провод
- 1 цилиндрическое гнездо для питания постоянного тока Для испытательного стенда
- 1 стержень с резьбой
- 1 подходящая под стержень гайка - разные шайбы и шурупы - куски древесины
Для управляющего компьютера:
- 1 старый компьютер (или ноутбук)
- 1 копия TurboCNC (отсюда)
Шаг 2.
Берем детали от старого сканера. Чтобы построить собственный ЧПУ контроллер нужно для начала извлечь из сканера шаговый двигатель и плату управления. Здесь не приведено никаких фотографий, потому что каждый сканер выглядит по-своему, но обычно нужно просто снять стекло и вывернуть несколько винтов. Кроме двигателя и платы можно оставить еще металлические стержни, которые потребуются для тестирования шагового двигателя.
Шаг 3.
Извлекаем микросхему из платы управления Теперь нужно найти на плате управления шаговым двигателем микросхему ULN2003. Если вы не смогли обнаружить ее на своем устройстве, ULN2003 можно купить отдельно. Если она есть, ее нужно выпаять. Это потребует некоторого умения, но не так уж сложно. Сначала при помощи отсоса удалите как можно больше припоя. После этого осторожно просуньте под микросхему конец отвертки. Осторожно прикоснитесь концом паяльника к каждому выводу, продолжая при этом нажимать на отвертку.
Шаг 4.
Пайка Теперь нам нужно припаять микросхему на макетную плату. Припаяйте к плате все выводы микросхемы. На показанной здесь макетной плате имеется две шины электропитания, поэтому положительный вывод ULN2003 (смотрите схему и на рисунке ниже) припаивается к одной из них, а отрицательный - к другой. Теперь, нужно соединить вывод 2 коннектора параллельного порта с выводом 1 ULN2003. Вывод 3 коннектора параллельного порта соединяется с выводом 2 ULN2003, вывод 4 - с выводом 3 ULN2003 и вывод 5 - с выводом 4 ULN2003. Теперь вывод 25 параллельного порта припаивается к отрицательной шине питания. Далее к управляющему устройству припаивается мотор. Делать это придется путем проб и ошибок. Можно просто припаять провода так, чтобы потом цеплять на них крокодилы. Еще можно использовать клеммы с винтовым креплением или что-нибудь подобное. Просто припаяйте провода к выводам 16, 15, 14 и 13 микросхемы ULN2003. Теперь припаяйте провод (желательно черный) к положительной шине питания. Управляющее устройство почти готово. Наконец, подсоедините к шинам электропитания на макетной плате цилиндрическое гнездо для питания постоянного тока. Чтобы провода не могли отломаться, их закрепляют клеем из пистолета.







Шаг 5.
Установка программного обеспечения Теперь о программном обеспечении. Единственная вещь, которая точно будет работать с вашим новым устройством - это Turbo CNC. Скачайте его . Распакуйте архив и запишите на CD. Теперь, на компьютере, который вы собираетесь использовать для управления, перейдите на диск C:// и создайте в корне папку "tcnc". Затем, скопируйте файлы с CD в новую папку. Закройте все окна. Вы только что установили Turbo CNC.





Шаг 6.
Настройка программного обеспечения Перезагрузите компьютер чтобы перейти к работе в MS-DOS. В командной строке наберите "C: cncTURBOCNC". Иногда лучше использовать загрузочный диск, тогда копия TURBOCNC помещается на него и нужно набирать, соответственно "A: cncTURBOCNC". Возникнет экран, похожий на изображенный на рис. 3. Нажмите пробел. Теперь вы находитесь в главном меню программы. Нажмите F1, и при помощи клавиш со стрелками выберите меню "Configure". При помощи клавиш со стрелками выберите "number of axis". Нажмите Enter. Введите количество осей, которые будут использоваться. Поскольку у нас только один мотор, выбираем "1". Нажмите Enter чтобы продолжить. Снова нажмите F1 и в меню "Configure" выберите пункт "Configure axes", затем дважды нажмите Enter.
Появится следующий экран. Нажимайте Tab пока не перейдете к ячейке "Drive Type". При помощи стрелки вниз выберите пункт "Phase". Снова при помощи Tab выберите ячейку "Scale". Чтобы использовать калькулятор, нам нужно найти число шагов, которые двигатель делает за один оборот. Зная номер модели двигателя, можно установить на сколько градусов он поворачивается за один шаг. Чтобы найти число шагов, которые двигатель делает за один оборот, теперь нужно поделить 360 на число градусов за один шаг. Например, если мотор поворачивается за один шаг на 7,5 градусов, 360 поделить на 7,5 получится 48. Число, которое получится у вас, забейте в калькулятор шкалы (scale calculator).
Остальные настройки оставьте как есть. Нажмите OK, и скопируйте число в ячейке Scale в такую же ячейку на другом компьютере. В ячейке Acceleration установите значение 20, поскольку установленных по умолчанию 2000 слишком много для нашей системы. Начальную скорость установите равной 20, а максимальную - 175. Нажимайте Tab пока не дойдете до пункта "Last Phase". Установите в нем значение 4. Нажимайте Tab пока не дойдете до первого ряда иксов.
Скопируйте следующее в четыре первых ячейки:
1000XXXXXXXX
0100XXXXXXXX
0010XXXXXXXX
0001XXXXXXXX
Остальные ячейки оставьте без изменений. Выберите OK. Теперь вы настроили программное обеспечение.









Шаг 7.
Строим тестовый вал Следующим этапом работы будет сборка простого вала для тестовой системы. Отрежьте 3 бруска дерева и скрепите их друг с другом. Чтобы получить ровные отверстия проведите на поверхности дерева ровную линию. Просверлите на линии два отверстия. Еще 1 отверстие просверлите посередине ниже первых двух. Отсоедините бруски. Через два отверстия, что находятся на одной линии, проденьте стальные пруты. Чтобы закрепить пруты воспользуйтесь небольшими шурупами. Проденьте пруты сквозь второй брусок. На последнем бруске закрепите двигатель. Не имеет значения, как вы это сделаете, будьте изобретательны.
Чтобы закрепить двигатель, имевшийся в наличии, использовали два отрезка стержня с резьбой 1/8. Брусок с прикрепленным двигателем надевается на свободный конец стальных прутов. Снова закрепите их шурупами. Сквозь третье отверстие на первом бруске проденьте стержень с резьбой. Заверните на стержне гайку. Проденьте стержень сквозь отверстие во втором бруске. Поворачивайте стержень до тех пор, пока он не пройдет сквозь все отверстия и не дойдет до вала двигателя. Соедините вал двигателя и стержень при помощи шланга и зажимов из проволоки. На втором бруске гайка удерживается при помощи дополнительных гаек и винтов. В завершение, отрежьте брусок дерева для подставки. Привинтите ее шурупами ко второму бруску. Проверьте, установлена ли подставка ровно на поверхности. Регулировать положение подставки на поверхности можно при помощи дополнительных винтов и гаек. Так делается вал для тестовой системы.










Шаг 8.
Подсоединяем и тестируем двигатель Теперь нужно соединить двигатель с контроллером. Во-первых, соедините общий провод (смотрите документацию к двигателю) с проводом, который был припаян к положительной шине питания. Другие четыре провода соединяются путем проб и ошибок. Соедините их все, и затем меняйте порядок соединения, если ваш двигатель делает два шага вперед и один назад или что-либо подобное. Для проведения тестирования подключите 12 В 350 мА источник питания постоянного тока в цилиндрическое гнездо. Затем соедините разъем DB25 c компьютером. В TurboCNC проверьте как соединен двигатель. В результате тестирования и проверки правильного подсоединения двигателя у вас должен получиться полностью работоспособный вал. Чтобы проверить масштабирование вашего устройства, прикрепите к нему маркер и запустите тестовую программу. Измерьте получившуюся линию. Если длина линии составляет порядка 2-3 см, устройство работает правильно. В противном случае, проверьте вычисления в шаге 6. Если у вас все получилось, поздравляем, самое трудное уже позади.


Шаг 9.
Изготовление корпуса
Часть 1
Изготовление корпуса - это завершительный этап. Присоединимся к защитникам природы и сделаем его из вторсырья. Тем более, что контроллер у нас тоже не с магазинных полок. У представленного вашему вниманию образца плата имеет размер 5 на 7,5 см, поэтому корпус будет размером 7,5 на 10 на 5 см, чтобы оставить достаточно места для проводов. Из картонной коробки вырезаем стенки. Вырезаем 2 прямоугольника размером 7,5 на 10 см, еще 2 размером 5 на 10 см и еще 2 размером 7,5 на 5 см (см. рисунки). В них нужно вырезать отверстия для разъемов. Обведите контуры разъема параллельного порта на одной из 5 х 10 стенок. На этой же стенке обведите контуры цилиндрического гнезда для питания постоянного тока. Вырежьте по контурам оба отверстия. То, что вы будете делать дальше, зависит от того, припаивали ли вы к проводам двигателя разъемы. Если да, то закрепите их снаружи второй пока пустой стенки размером 5 х 10. Если нет, проткните в стенке 5 отверстий для проводов. При помощи клеевого пистолета соедините все стенки вместе (кроме верхней, см. рисунки). Корпус можно покрасить.













Шаг 10.
Изготовление корпуса
Часть 2
Теперь нужно приклеить все компоненты внутрь корпуса. Убедитесь, что на разъемы попало достаточно много клея, потому что они будут подвергаться большим нагрузкам. Чтобы коробка оставалась закрытой, нужно сделать защелки. Из пенопласта вырежьте пару ушек. Затем вырежьте пару полос и четыре небольших квадратика. Приклейте по два квадратика к каждой из полос как показано на рисунке. Приклейте ушки по обеим сторонам корпуса. Сверху коробки приклейте полосы. Этим завершается изготовление корпуса.

Шаг 11.
Возможные применения и заключение Этот контроллер можно применять как: - ЧПУ устройство - плоттер - или любую другую вещь, которой нужно точное управление движением. - добавление- Здесь приведены схема и инструкции по изготовлению контроллера с тремя осями. Чтобы настроить программное обеспечение, следуйте вышеуказанным шагам, но в поле "number of axis" введите 3.
зарегистрироваться .Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.

Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.

Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Также существует ещё два типа шаговых двигателей: униполярные и биполярные . На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.

Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.

То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.

Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.

5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.

Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага . Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер . Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A .

В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.